Go Back

Lin
Market Update: The Robots Are Coming
Humanoid robotics is one of the most important second-order AI themes because it extends artificial intelligence from the digital world into physical world.
The first phase of the AI cycle was mostly about software: models that write text, generate code, summarize data, produce images, search documents, and automate knowledge work. AI has spent the last few years living mostly behind a screen.
The next phase is about embodied intelligence or physical AI, where models do not just understand the world through tokens, images, and video, but also act inside the world through sensors, motors, actuators, hands, legs, and real-time control systems.
The world has a massive labor market, most physical environments were designed around the human body, and humanoid robots are becoming cheaper at the same time that AI models are becoming more capable. It’s probably the biggest market of all. The broader economic value of automating physical labor is likely somewhere in the neighborhood of $26T.
The timing has changed because 3 curves are improving at the same time: AI capability, robotics hardware, and compute infrastracture.
On the AI side, multimodal models are getting better at scene understanding, instruction following, object recognition, spatial reasoning, video prediction, and task planning. A humanoid robot does not just need to classify what it sees. It needs to convert perception into action. It needs to identify an object, estimate its position, understand its shape, decide how to approach it, apply the right amount of force, move without losing balance, detect failure, and recover if the object slips or the environment changes. This is why robotics is much harder than chatbots. A language model can be useful even when it is imperfect. A robot operating near humans or expensive industrial equipment has a much lower error tolerance.
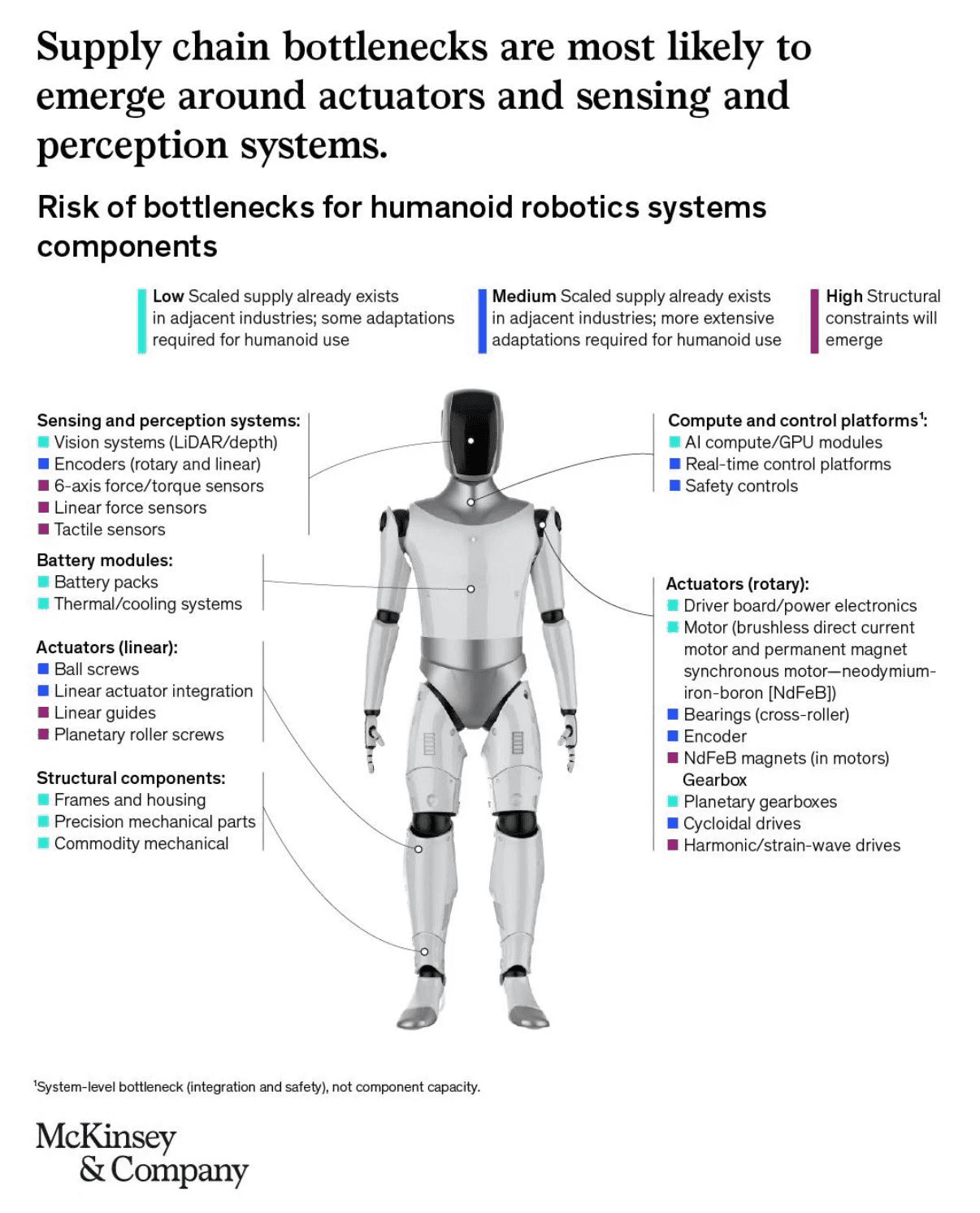
On the hardware side, the key components are becoming more capable and cheaper. Cameras, depth sensors, inertial measurement units, force sensors, torque sensors, compact motors, harmonic drives, batteries, edge AI chips, and embedded control systems are all improving because they benefit from adjacent markets such as smartphones, electric vehicles, drones, industrial automation, gaming, logistics automation, and AI compute. The robot body is still hard, but the supply chain is no longer starting from zero.
On the compute side, humanoid robotics creates demand across several layers. The industry will need large-scale AI compute for model training, simulation infrastructure for synthetic data generation, fleet learning systems to improve robots from real-world deployment, and onboard inference chips for low-latency control inside the robot. The robot cannot send every decision to the cloud because walking, grasping, balancing, and collision avoidance require fast local control. And that’s very similar to the infrastructure we’re already building for AI and agentic AI.
This is still a few years away. But advancement in AI and robotics are moving incredibly fast. And right now the catalyst is Agility Robotics. The humanoid robot maker announced plans to go public via SPAC at a $2.5B valuation, with backing and partnerships from names like Foxconn, Nvidia, Amazon, and SoftBank. That would make it one of the first pure-play humanoid robotics companies listed in the US under the ticker $AGLT.
This could become one of the biggest market themes of the next several years. Ince the robot is cheap enough and useful enough, adoption could move very fast because the ROI becomes obvious.
I’ve been very bullish on this sector for a while. That is why the humanoid robotics theme was one of the first themes I ever created.
So, here are some of the key robotics names I’m watching right now in their respective subsectors. Many of which have been discussed at length already and some which will be featured soon.
1. Lidar Sensors
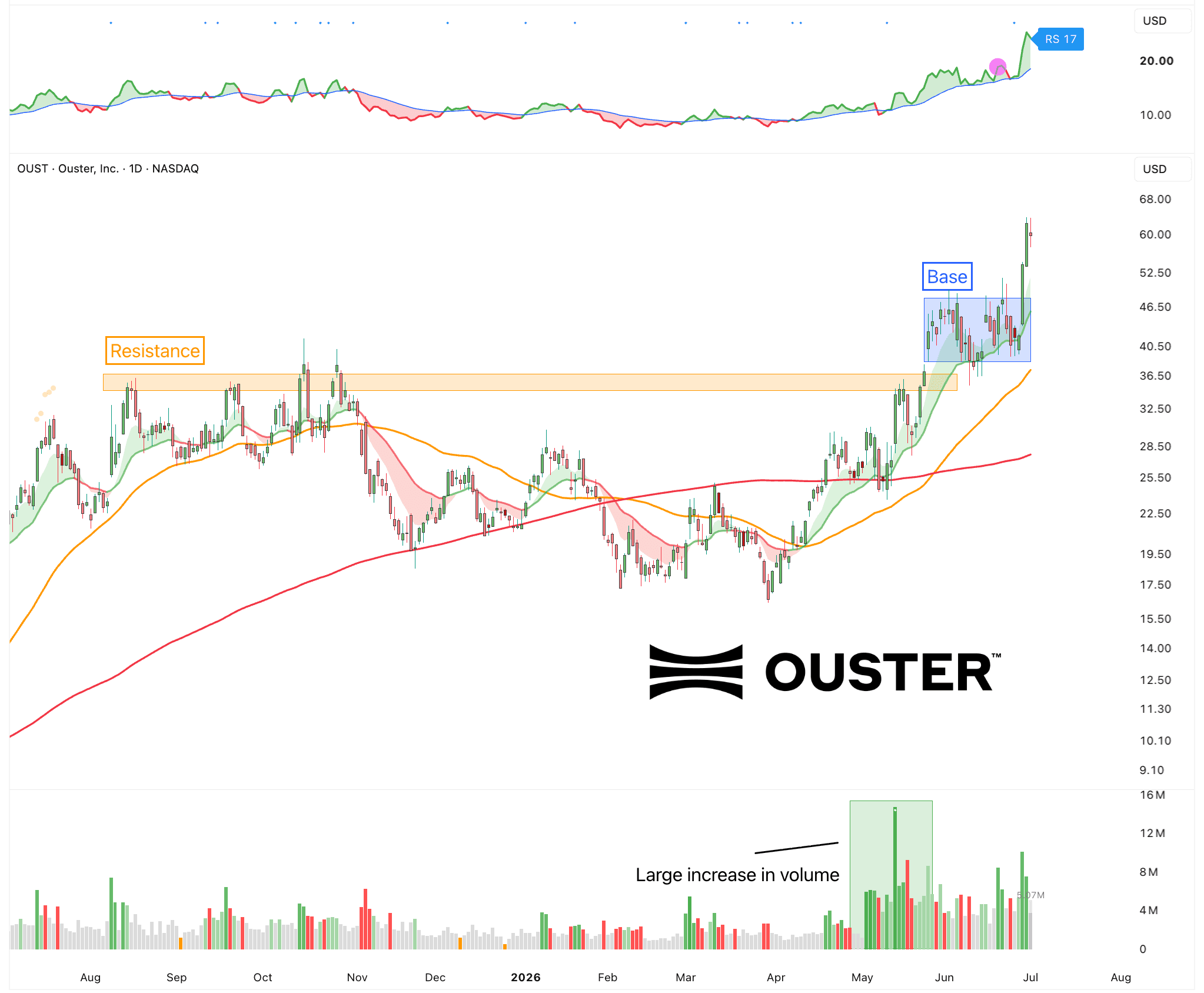
Ouster and Aeva have been featured already. sit in the spatial sensing layer, which is needed when a robot has to understand distance, geometry, movement, and obstacles in real time. Cameras are useful because they capture rich visual information, but robots also need reliable depth and motion data to walk through factories, avoid people, localize themselves, and understand where objects sit in 3D space. Ouster’s digital lidar approach is relevant for mapping, navigation, robotics, and industrial automation, while Aeva’s 4D lidar angle adds direct velocity measurement, meaning the sensor can detect not only where something is, but also how it is moving.
Ouster $OUST
AEVA $AEVA

2. Machine vision
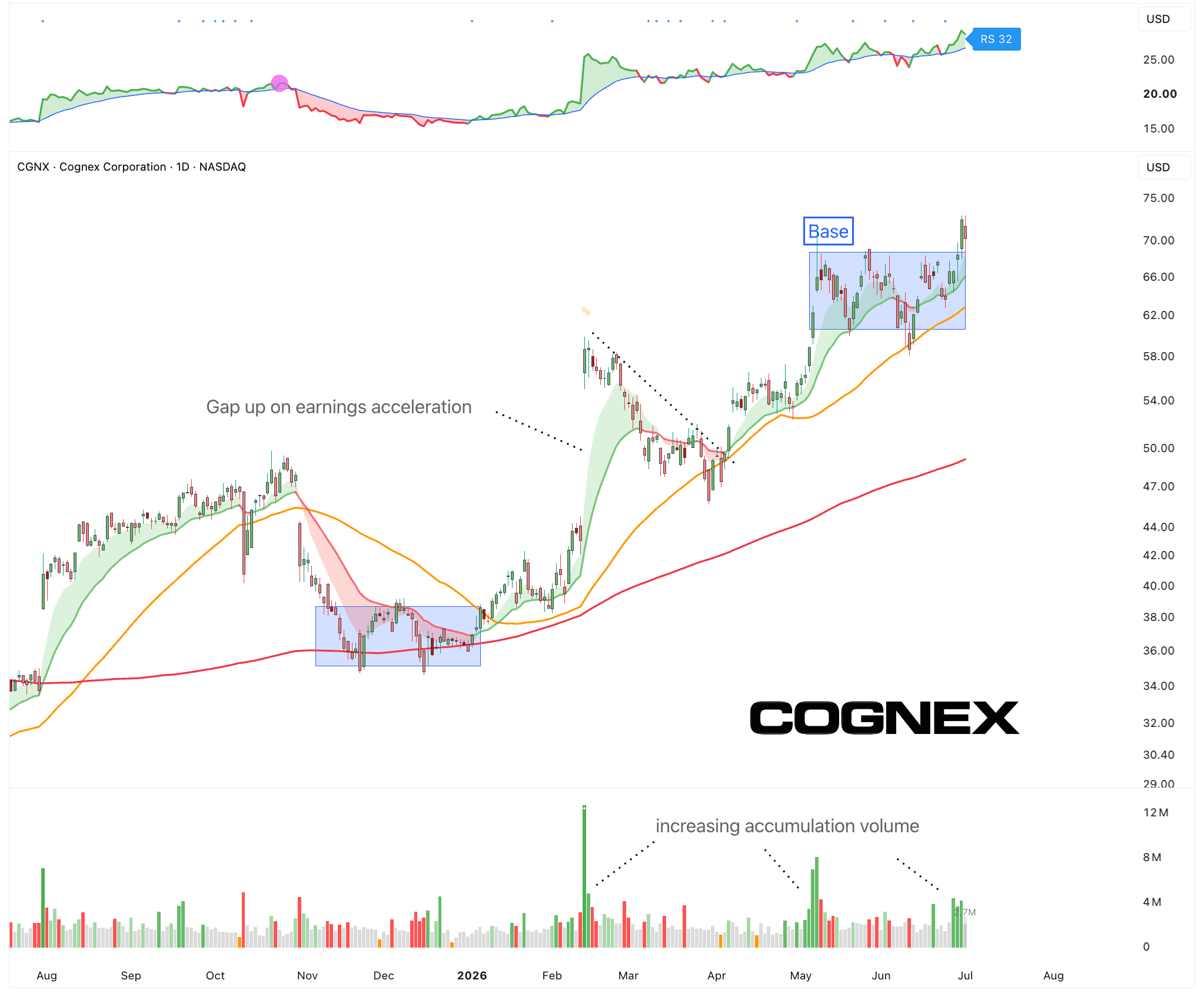
In a factory, vision is not just about detecting an object. The system needs to read labels, recognize part types, check orientation, detect defects, inspect surfaces, confirm whether something is correctly placed, and guide motion with enough accuracy to interact with real production workflows. This is different from consumer computer vision because industrial environments care about repeatability, lighting robustness, tolerance windows, false positives, and integration with existing automation systems.
Cognex $CGNX
3. Force and touch
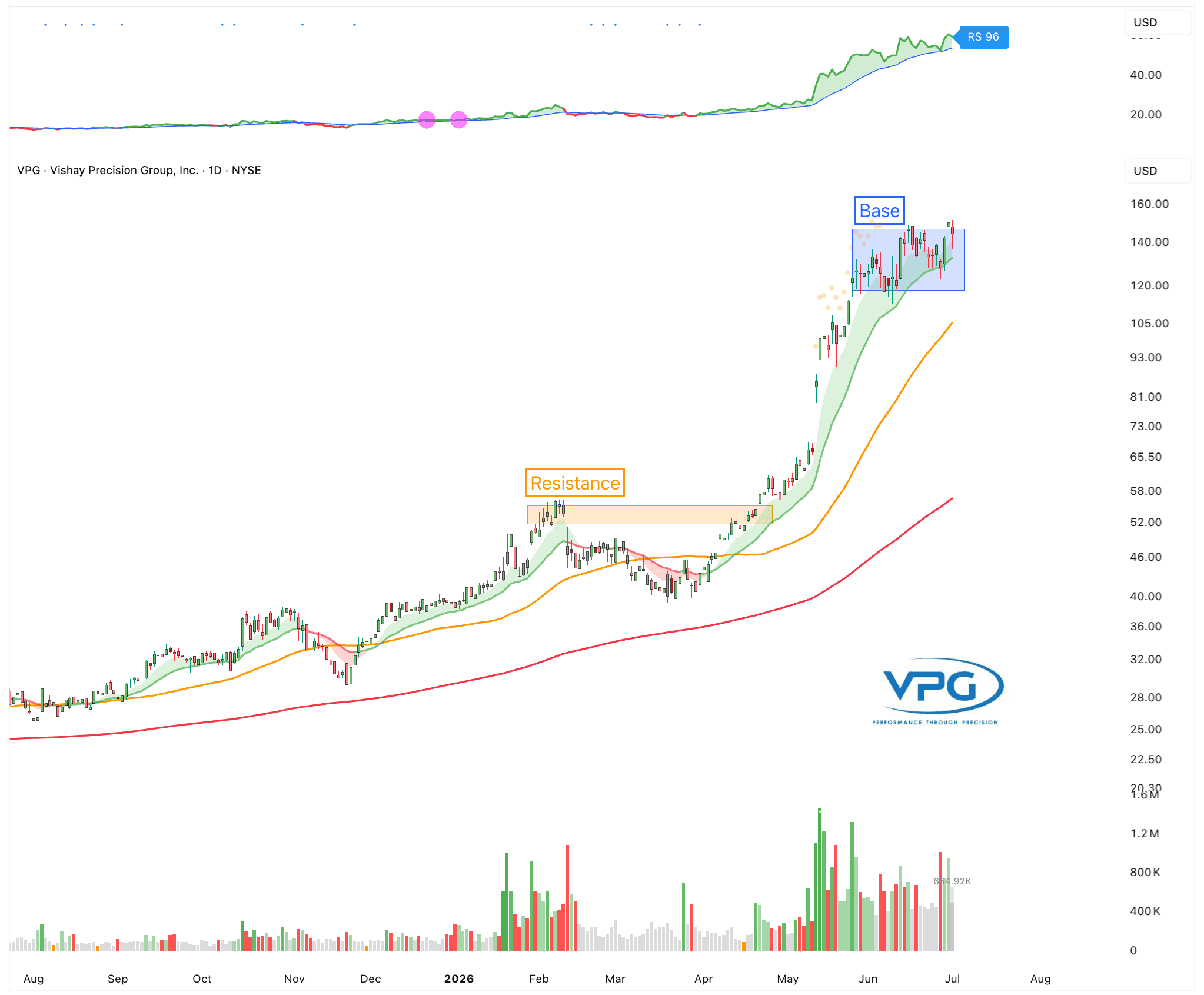
Vision can tell the robot where an object is, but it cannot tell the robot how much force it is applying, whether a part is slipping, whether a load is too heavy, whether a contact point is misaligned, or whether the robot is about to damage something. That requires sensors that translate physical stress, strain, load, torque, and pressure into electrical signals the control system can use. This is important for gripping boxes, lifting components, inserting parts, pushing buttons, handling tools, and working near people. A robot without good force feedback is basically blind at the moment of contact.
Vishay Precision Group $VPG
4. Humanoid Makers
Tesla remains the most direct public exposure for now because Optimus is a full humanoid system. Lately, it’s been overshadowed SpaceX. But the technical bet is that Tesla can reuse parts of its autonomy stack, battery knowledge, motor control, embedded software, manufacturing process, and factory footprint to build a robot that can first work inside its own production environments. If Tesla can use Optimus for repetitive factory work such as material handling, part movement, machine loading, inspection support, and simple assembly tasks, it can improve the system in a controlled environment before selling it externally.
Tesla $TSLA

5. Egde AI Compute
Ambiq and Ambarella sit in the local compute layer, where perception and control have to happen on the robot itself. A humanoid cannot send every camera frame, sensor signal, balance correction, collision check, and grasping decision to the cloud because latency, bandwidth, reliability, and safety requirements are too strict. The robot needs onboard processors that can run vision models, sensor fusion, object detection, tracking, motion estimation, and safety logic in real time while staying within tight power and thermal limits. Ambiq is relevant because ultra-low-power compute matters for battery-powered machines where every watt affects operating time and heat. Ambarella is relevant because its edge AI vision processors are built around efficient video processing and neural network inference, which maps well to robotics perception.
Ambiq $AMBQ

Ambarella $AMBA

Previous Updates
View All
- Weekly Market Update: The Broadening
- Market Update: The Break Point
- Weekly Market Update: Patience
- Market Update: The Memory Crunch
- Weekly Market Update: The First Trillionaire
- Market Update: In Focus
- Weekly Market Update: Deleveraging
- Market Update: A Change of Character
- Market Update: The Next Quantum Leap
- A Few Portfolio Changes
- Weekly Market Update: New Month, New Opportunities
- Market Update: Compute, Compute, Compute
- Weekly Market Update: The Bulls March On